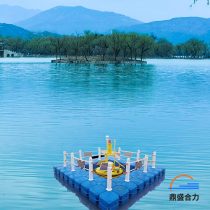
无人船(Unmanned Surface Vehicles,简称USV)作为一种可远程操控或自主航行,执行特定任务的水上特种机器人。融合了船舶设计与工艺、通信、测控、机器人算法、避障、组网系统等综合技术,可实现整个水上作业过程的智能化、无人化。 R-U130作为我公司一款小型单体综合无人船智能平台,可搭载多类型设备,具有良好的通用性和适用性,为水利业务管理提供更为先进的数据获取装备,有效的降低了运营成本、确保作业人员安全。
R-U130是我公司第二代小型单体综合无人船智能平台,在原U110船体基础上进行升级改进,提升了无人船航行的稳定性、设备换装搭载能力和续航能力,具有更好的通用性和适用性,可搭载多类型设备,为水利业务管理提供更为先进的数据获取装备;采用无人船进行水文作业,可有效的降低了运营成本、提升作业人员的安全性。
R-U130作为一款通用水文测量平台,具有灵活的换装搭载能力,根据工作任务可换装搭载不同仪器设备,如:单波束测深仪、ADCP、侧扫声呐、GNSS测量设备、多参数水质设备等,完成多种水下测量与监测任务。
智能化系统可实现自主导航,自主规划航行路径,定位及停留准确;涵道式推进器,防渔网水草缠绕,支持倒车航行,推进器与船底部齐平,利于布放与回收。
采用单体流线船型设计,重心低,航行稳,耐波性强,阻力小,吃水浅,可适用多种水域环境进行作业,为水文应用提供—个稳定的智能水上作业平台。
设备安装简单,换装方便,灵活的换装搭载部件,方便不同设备换装,可搭载单波束测深仪、ADCP、侧扫声呐、多参数水质分析仪、水质采样设备。
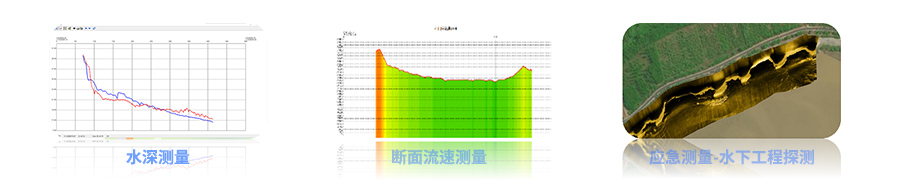
作为一款便携小型单体无人船,可用于多种水文作业,如:水深测量、断面测量、流速流量测量、水质巡测、水质采样、应急测量等。